I've finally found some time to devote to my automatic antenna tuner build,
and I've just finished incorporating the Match-Detection circuitry into
it. (The previous post in this series can be found here:
http://k6jca.blogspot.com/2015/09/antenna-auto-tuner-design-part-7-build.html).
Originally I had planned to incorporate four different Match Detection functions. These functions were to be:
But as I proceeded with this latest phase of the build I discovered I was space-constrained within the tuner's chassis (besides being timed constrained, too), and that it would be difficult to fit into the chassis all of the circuitry I had hoped to install. So I decided to limit the detectors to a single one: the Return Loss (SWR) Detector. The design and installation of this detector is described below.
I've broken this design into two schematics. The first schematic describes the Directional Coupler, including the two AD8307 Log-Amp Detectors which convert the Directional Coupler's output voltages into voltages that correspond to power in decibel form.
The second schematic describes the circuitry used to calculate Return Loss and which also provides outputs for driving an analog panel meter as well as a microprocessor with A/D inputs (I hope to describe the incorporation of this processor in the next blog post).
Let's take a look at these two schematics. First, the Directional Coupler...
Schematic, Directional Coupler:

Notes on the Directional Coupler Schematic:
I originally described my proposed Directional Coupler design in this post: http://k6jca.blogspot.com/2015/07/antenna-auto-tuner-design-part-5.html
But since writing that post, I've made two changes to the proposed design:
I chose to use cores of different sizes because there is no reason why the current-sense transformer should be the same size as the voltage-sense transformer. The Flux Density within the current-sense transformer is much less than the voltage-sense transformer's Flux Density, as I show in this spreadsheet:
Originally I had planned to incorporate four different Match Detection functions. These functions were to be:
- Return Loss (SWR) Detector
- R Detector
- G Detector
- Phase Detector
But as I proceeded with this latest phase of the build I discovered I was space-constrained within the tuner's chassis (besides being timed constrained, too), and that it would be difficult to fit into the chassis all of the circuitry I had hoped to install. So I decided to limit the detectors to a single one: the Return Loss (SWR) Detector. The design and installation of this detector is described below.
I've broken this design into two schematics. The first schematic describes the Directional Coupler, including the two AD8307 Log-Amp Detectors which convert the Directional Coupler's output voltages into voltages that correspond to power in decibel form.
The second schematic describes the circuitry used to calculate Return Loss and which also provides outputs for driving an analog panel meter as well as a microprocessor with A/D inputs (I hope to describe the incorporation of this processor in the next blog post).
Let's take a look at these two schematics. First, the Directional Coupler...
Schematic, Directional Coupler:
(Click on image to enlarge)

Notes on the Directional Coupler Schematic:
I originally described my proposed Directional Coupler design in this post: http://k6jca.blogspot.com/2015/07/antenna-auto-tuner-design-part-5.html
But since writing that post, I've made two changes to the proposed design:
- The current-sense transformer and voltage-sense transformers now use differently sized cores.
- The turns-ratio of each transformer is now 24, not 25
I chose to use cores of different sizes because there is no reason why the current-sense transformer should be the same size as the voltage-sense transformer. The Flux Density within the current-sense transformer is much less than the voltage-sense transformer's Flux Density, as I show in this spreadsheet:

The formulas used in the above spreadsheet can be found in the following two posts:
The spreadsheet shows that the flux-density within the current-sense
transformer's core is well within the specification of an FT50-43 core.
On the other hand, the voltage-sense transformer has a
significantly higher voltage across its N-turn winding and thus a significant
higher flux density, and so it uses a larger 2643625002 core (that I had in my
junkbox).
Note: Many designs using the Tandem Match Directional Coupler topology use identical cores for both Voltage and Current sensing transformers. They needn't (as I've demonstrated above), and if a design is space-constrained (or cost constrained), a smaller core can be used for the current-sense transformer.
2. Turns-ratio:
My original plan was to use 25 turns on each coil, but when I wound my first transformer I discovered that I had cut the wire slightly too short and I only had enough wire to wind 24 turns around the core. Rather than rewind the core, I decided that 24 turns was good enough -- its Coupling Factor is 27.6, which is only 0.4 dB less than 28 dB (the Coupling Factor if the turns-ratio were 25, not 24).
3. AD8307, Return Loss, and non-Simultaneity:
Why use AD8307 Log-amp detectors rather than just rectify the Directional Coupler's Forward and Reflected port voltages and amplify/buffer them with op-amps?
Two reasons. The first is convenience.
I wanted to have some way to measure and display load-mismatch before I incorporated a microprocessor into the design. I had used the AD8307 IC previously (here), and I knew that two AD8307 ICs would make this mismatch-measurement task easy -- they would convert the Directional Coupler's voltages into decibel form, from which Return Loss (which is related to SWR) could be calculated by simply subtracting the Reflected-path's AD8307 output from the output of the Forward-path's AD8307 output.
This Return Loss measurement would be accurate over a wide range of power (sub-watt to a kilowatt, in my design) without any need for additional pot tweaking if the input power changed.
And the second reason for this choice is my concern over A/D sampling methodology...
Over the years I've collected a number of commercial ham radio auto-tuners utilizing relay-switch components and controlled by microprocessors. Most of them are gathering dust on a closet shelf because, when I used them, I noticed at times an inability to achieve a good match, even though one was available.
I've assumed this problem was due to microprocessor sampling, specifically that the micro was sampling and converting the Forward and Reverse voltages sequentially, rather than simultaneously.
Why might sequential sampling be a problem?
Suppose that the power level into the Tuner was fluctuating during these measurements (perhaps due to PA ALC action caused by load impedance variation (as the tuner tunes), or perhaps due to voice transients, or perhaps due to some other reason), then, if the power level changed between the measurement of the Forward voltage and the measurement of the Reflected voltage, the microprocessor's SWR calculation could be incorrect.
And if the SWR calculation was incorrect, it was possible, too, that the tuned-to setting was incorrect and perhaps sub-optimal.
Of course, the severity of this potential error is a function the time delay between sequential samples as well as the input-power's rate-of-change.
Could either of these be large enough to be an issue? I didn't, and don't, know. But just in case they were, by calculating Return Loss (or SWR) externally and then feeding that result into a single A/D, rather than calculating Return Loss or SWR from two sequentially-sampled A/D values, the possibility of there being a problem (be that problem real or imaginary) was eliminated.
OK, let's continue...
4.AD8307 input range and PI attenuator:
From the its datasheet, here is a graph of the AD8307's output voltage versus input power:

As you can see, the transfer characteristic becomes noticeably non-linear above +15 dBm and below about -68 dBm. So (in my opinion), a reasonable range of operation (with a bit of headroom) would be between -60 and +10 dBm.
I've specified the maximum power that this tuner should see as being 800 watts, but for the purposes of determining the input-range of the AD8307 ICs let's assume that it's 60 dBm (1 KW).
Therefore I will need 50 dB of attenuation to bring a 60 dBm signal down to my desired AD8307 maximum input level of +10 dBm.
Given that the 24-turn transformers have a Coupling Factor of 27.6 dB, I will need an additional 22.4 dB of attenuation (it doesn't need to be exactly 22.4 dB -- somewhere in the ballpark of that value will be fine -- I've designed in plenty of headroom).
So I've terminated each output of the Directional Coupler with a 50-ohm 22 dB PI-network attenuator. Implemented with standard 1% resistor values (59 and 316 ohms) and taking into account the AD8307's input resistance of 1.5K ohms, the actual attenuation is 22.2 dB, and its input Return Loss is 50 dB. (PI Network calculator here: http://chemandy.com/calculators/matching-pi-attenuator-calculator.htm).
For power-dissipation calculations the maximum average power applied to the tuner is assumed to be 200 watts. This power level is attenuated by the Directional Coupler's Coupling Factor (27.6dB) prior to being applied to the PI attenuators, which means that the maximum average power applied to a PI attenuator would be 0.35 watts.
Most of this 0.35 watts would be dissipated by the PI attenuator's first shunt resistor, so I've implemented this resistor with two 118 ohm 1/4-watt resistors connected in parallel.
5. AD8307 Circuit:
The AD8307 circuitry is essentially the same circuit shown in the datasheet. I have not incorporated the Intercept and Gain pots, preferring to do these functions in the Return Loss Calculator circuitry (described later in this post).
One AD8307 converts the Forward Power from the Directional Coupler to a decibel-related voltage. The second AD8307 does the same for the Reflected Power.
The two AD8307 ICs are in their own shielded compartment with 0.1uF caps (and feed-thru caps) at the output and power pins of these two ICs to reduce the chances of external RF fields affecting performance in unwanted ways.
Note that the second shunt resistor of each PI attenuator is also installed in this compartment.
The AD8307 outputs have a transfer characteristic of about 25mV per dB of applied power, with a DC offset (when no RF is applied) of (very) roughly 0.28 VDC.
Schematic, Return Loss Calculator:

Notes on the Return Loss Calculator Schematic:
The AD8307 output voltages represent, in dB form, the power applied to their inputs. And thus Return Loss can be calculated via a simple subtraction, implemented with a single op-amp:

where Pi(dBm) is the output of the Forward path AD8307 and Pr(dBm) is the output of the Reflected path AD8307 (equation copied from Wikipedia).
SWR is related to Return Loss by this equation:

Not a simple relationship, but knowing this equation, if I'm using an analog panel meter to aid me in tuning, and if this meter's full-scale represents 30dB return loss (i.e. only 0.1% of the applied power is reflected back -- a very good match!), then I can easily mark the meter's scale per the following table:

A note on Return Loss meter orientation: when tuning an antenna tuner using a Return Loss meter, the goal is to peak the Return Loss reading, which will then correspond to minimum SWR. But I've been adjusting tuners for decades by dipping SWR meters for minimum SWR, so the Return Loss adjustment method of peaking the reading seems awkward to me.
A simple solution (it seems to me) is to install the Return Loss meter upside-down. So, in my tuner, a Return Loss of 0 (infinite SWR) corresponds to the meter's needle at the top of the meter (undeflected). And when the tuner has been tuned for a 1:1 match, the needle will deflect to its full-scale reading at the bottom of the meter's scale -- thus one dips the meter for best SWR!

2. VF and VR circuits:
One of my goals is to incorporate a processor with A/D inputs (PIC or Arduino) to perform the automatic tuning, and I thought it would be nice to use the processor to calculate and display Forward Power using the AD8307 VF signal (and perhaps calculate and display Reflected Power using VR).
Assuming the processor A/D is referenced to its VDD pin (+5VDC), I'd like to have 4.5VDC represent the maximum applied power of +60 dBm (to give me a bit of headroom).
Also, I would like the range of Forward Power represented by VF to be, at a minimum, from 1 watt (30 dBm) to 1 KW (60 dBm). Plus, if I'm measuring a 30 dB Return Loss when Forward Power is 1 watt, then the Reflected Power will be 1 milliwatt (0 dBm). And so VR must be just at least 0V when the Reflected Power is 0 dBm.
So, VF and VR, in spanning the range from 0 to 4.5 volts, must represent, at a minimum, a power range of 0 to 60 dBm.
If the AD8307's transfer function is 25 mV per dB, then multiplying this value by 3 would result in a transfer function of 75 mV per dB, which would give us a 60 dB span over the voltage range from 0 to 4.5 volts.
But why not have a bit more range? If I multiply the AD8307's transfer function by 2 instead of 3, I will change the transfer function to 50 mV per dB (500 mV per 10 dB). Assuming a 10-bit ADC referenced to 5 VDC, measurement resolution would be about 0.1 dB, which would be perfectly fine in this application.
And note that at 50 mV per dB, 0 to 4.5V will represent a 90 dB span, so I could accurately measure power and Return Loss at powers well below 1 watt. (Theoretically, this would put the lower Forward Power limit for accurate Return Loss measurements at 0 dBm (1 milliwatt), but as I'll discuss below, the AD8307's specifications result, in this application, in a practical lower limit of +10 dBm Forward Power for accurate measurements).
Op-amps U1A and U1B, configured as non-inverting amplifiers with gains of 2, perform this amplification. And by connecting the AD8307 outputs directly to their non-inverting inputs, I avoid any unnecessary loading of the AD8307 outputs that might affect their gain.
Potentiometers R11 and R12 create a DC shift so that, when calibrated, +4.5V represents +60dBm. U11B and U11C isolate these two pots from being included in the gain-equations of the U1A and U1D feedback networks, so that adjusting R11 and R12 won't also change the path gain.
The voltages at U1.7 and U1.8 should be about 0.75 VDC when R11 and R12 are centered. I then adjust R11 and R12 so that, for a +10 dBm signal applied to the Directional Coupler, VF (or VR) measures 2.00 VDC.
3. Return Loss Circuit:
U2 performs two functions. It subtracts VR from VF to create the Return Loss measurement, and it also multiplies this result by 3.
The scaling factor of 3 was chosen so that a measurement of 30 dB of Return Loss would be equal to 4.5V at VRL (VRL is the Return Loss signal that would drive a processor A/D input). In other words, given the transfer characteristic of VF and VR of 50 mV per dB, I'd like the Return Loss transfer characteristic to be 150 mV per dB.
U2 also drives an analog panel meter so that I can use the tuner without having a processor installed. The meter is 1 mA full-scale, and R19 adjusts the current through the meter so that 4.5V at VRL results in 1mA through the meter. Thus, the meter would read 30 dB of Return Loss when deflected to its full scale.
R24 compensates for differences in path-gain between the Forward and Reflected paths. Because it is in the attenuator network attached to U2's non-inverting input, it adjusts the gain of the Forward path (the gain of the Reflected path being fixed).
But there's a potential problem -- changing the gain at this point also changes, in effect, VF's DC offset as seen at U2's non-inverting input. And because this change in DC offset at U2 is occurring simultaneously with a change in the Forward path gain at U2, these two changes become inextricably intertwined, and I don't know by how much I should adjust R11 to compensate for this change in offset.
The net effect is that VRL could be shifted slightly either higher or lower by a constant amount. And thus Return Loss could be shifted, too, to be either higher or lower than it should be.
If the shift is small, this shouldn't be a big deal. But it could become a problem for larger shifts, depending upon how accurate one wants the Return Loss measurement to be.
Fortunately, in my "one-off" build, the transfer characteristics of the two AD8307 ICs are essentially identical at 25 mV per dB and so adjusting U2's gain via R24 should be fine in this application -- I'm essentially just setting the gains of each of U2's "legs" to be equal. But in hindsight I would have approached path-gain compensation differently.
For example, I probably would have made U2's gain fixed, without any pots (and using 1% resistors) and instead had separate gain adjustments earlier in the Forward path and the Reflected path. Pots could have been placed at the outputs of the AD8307 ICs (per the datasheet), for example, or in the feedback networks of U1A and U1D.
But that's hindsight.
4. Other notes:
0.1 uF caps are sprinkled liberally throughout the circuit and especially at any connector to which a cable might attach, thus bypassing these connectors to ground to (hopefully) prevent external RF fields that might couple into the wiring from affecting circuit operation.
I've inserted 100 ohm resistors between op-amp outputs and 0.1uF bypass caps (where these are used) to "isolate" the op-amp's output (and feedback network) from the capacitive load and thus isolate this load's effect on the overall amplifier phase-response and stability. (More info on this here (Analog Devices), here (TI), and here (Microchip)). (Unfortunately, TI doesn't spec the output impedance of the LMC660 series, so it's difficult to judge what the effect actually is. However, per my bench measurements, stability seems fine).
I also roll-off the U2's response with C9 and C10, placing a pole at about 5 KHz -- there's no reason why this op amp needs a wide bandwidth.
OK, I believe I've covered the schematics. On to the build...
Build, Directional Coupler:
The Directional Coupler started out as a prototype on a piece of PCB stock that would fit within the Tuner on the existing Capacitor-select board. I tried some different orientations for the two transformers, such as orthogonal to each-other, but Directivity was only about 20 dB, so I went back to the implementation I'd used in this post: http://k6jca.blogspot.com/2015/01/building-hf-directional-coupler.html, which was:

I changed the current-sense transformer's core size (see discussion above) and bread-boarded the circuit:

Measuring Directivity:
With the implementation shown above Directivity measure 45 dB or better from 1 to 30 MHz. But when I added additional compartment shielding and the 22 dB PI attenuators, worst-case Directivity dropped from 45 dB to 35 dB:

Note that the 30 MHz marker in the image above shows 85 dB of attenuation. But we need to factor out 50 dB of attenuation (27.6 dB coupling factor plus the PI Attenuator's 22.2 dB of attenuation). The result is 35 dB of attenuation, which represents the Directional Coupler's Directivity.
Here's that implementation:

(Note that you can just see the AD8307 circuitry at the far-left of the image above. Although present in the photo above, this circuitry had not yet been installed when I made my Directivity measurements.)
Also, if you look closely, you can see some yellow Teflon insulation on the end of one of the voltage-sense transformer's secondary winding. There is actually Teflon insulation on both ends of this winding. Both ends are side-by side on the transformer and there is a high voltage potential between them (one end being grounded and the other end connected to the transmission line).
There is also a little rectangle of Kapton tape mounted under voltage-sense transformer on the bottom of the compartment. It provides a bit more voltage isolation between the transformer windings and chassis ground.
(I also tested an implementation using a 2643625002 core for the current-sense transformer. I saw no difference in performance between it and the FT50-43 I am currently using.)
Return-Loss Uncertainty due to Directivity:
Now that I knew the Directional Coupler's Directivity, I could determine Return-Loss Uncertainty.
Note that with a worst-case Directivity of 35 dB, there will be an increasing uncertainty in Return Loss readings as the Return Loss approaches its theoretical maximum of 35 dB (Return Loss cannot be larger than the Directivity). This uncertainty is shown in the table below, per the calculator found here bytecollector.com/library/DirectivityErrorCalc-w-SWR.xls:

So, given my planned-for maximum Return Loss reading of 30 dB and a worst-case Directivity of 35 dB, the actual Return Loss for this reading (and excluding path errors such as AD8307 accuracy) would lie somewhere in the range between 26 and 37 dB, which represents an actual SWR that would be between 1.03 and 1.1 -- still quite acceptable.
AD8307 circuit implementation:
The AD8307 ICs are SOIC-8 packages. I find that such a small size can be a headache to prototype with (unless, of course, one has a PCB with appropriate component footprints), so I purchased some small SOIC prototyping boards from eBay. These greatly facilitate wiring to the IC pins. (Alternatively, I could have purchased these ICs in DIP packages).

(I later added copper tape to shield the sides of the AD8307 chamber, and a copper top will be added over the entire assembly after I finished mounting it in the tuner chassis).
Build, Return Loss Calculator:
When I finished my Directional Coupler build I discovered, if I placed it in the Tuner chassis, there wasn't much additional room available on the Capacitor-selection board for me to add the Return Loss Calculator Circuitry.
And given the fact that my junk-box potentiometers were all designed to mount end-on, I decided instead to build the circuit on a small piece of plated-through perf board that I would mount vertically on the bulkhead shield that separates the Tuner's RF compartment from the Control compartment.
Although the two ICs are DIP ICs, the passive resistors and capacitors are all surface mount (0805 packages).
Here's the build, shown un-annotated and also annotated with I/O names and potentiometer reference designators added:


The board was notched in two places due to mechanical interference issues with two pre-existing mounting screws, given the tight space that I was trying to mount it into.
Incorporating the Directional Coupler and the Return Loss Assemblies into the Tuner Chassis:
Here's a picture showing the installed Directional Coupler Assembly and Return Loss Calculator Assembly. (You can see the latter's pots next to the bulkhead divider).

(Note that I did not remove the SMA connectors on the Directional Coupler assembly. They are left there in case I need them for future testing.)
Below I've installed a copper plate (cut from a sheet of 26 gauge copper) over the top of the RF compartments, with bent-down tabs tacked to the side walls in 5 places.

Calibration Procedure:
1. With the Directional Coupler's output unloaded (open load) and disconnected from the Tuner's L-Network circuitry, and with a +10 dBm 3.5 MHz signal applied to the Directional Coupler's input, make the following adjustments:
Design Verification Measurements:
1. VF and VR versus Input Power.
This test is performed with the Directional Coupler's output unloaded (i.e. open, so that Forward and Reflected powers are identical) and after R11 and R12 have been calibrated to give equal readings of 2.00 volts at VF and VR for a +10 dBm input signal. It measures the response, versus signal level, of VF and VR.

Note that the gain of VF and and the gain of VR are essentially identical. (There's no guarantee that this will be true for all AD8307's, though).
2. VRL versus Zload:
This test measures the Return Loss voltage versus different loads connected to the Directional Coupler's output. Note that the Zload is resistive rather than a complex impedance.

For the three loads I used, the measured Return Loss is close (error under a dB) to the loads' actual Return Loss (per my HP 8753A). This error is quite adequate for my tuner application, which is not meant to be a lab-grade measurement device.
3. Step Response, VRL
This test checks VRL's step-response to a change in Return Loss, measuring the amount of time it would take the VRL reading to settle down after, for example, a change to the tuner's L-Network settings.
But rather than performing the test by changing the Directional Coupler's load in a "step" fashion (for which I'd have to design some sort of fast-switching circuit), I instead "mimic" a change in load impedance by taking advantage of the VF and VR circuits' characteristics at low signal levels.
This is an important point: specifically, if the drive to the Directional Coupler is less than +10 dBm, and if the load itself is an accurate 50 ohm load (Return Loss > 30 dB), the measured Return Loss will be a function of the input power level, rather than a function of the load attached.
This effect is mainly due to the fact that, at low power levels, the VF and VR op-amp outputs will clamp to their negative rail -- they cannot go below 0 volts.
Thus, even with a 50 ohms load is connected to the Directional Coupler's output, Return Loss will appear to be very poor if the applied power level is very low, as I demonstrate in this table:

As one can see, because VR cannot go below U1's lower power rail of 0V, the delta between VF and VR is artificially reduced at low power levels. And so Return Loss erroneously appears to worsen.
One important conclusion from this data: If the input power applied to the Directional Coupler is less than +10 dBm, the Return Loss measurement could be wrong. So tuning should only be done when VF measures at least 2.0 VDC (i.e. input power at least +10 dBm).
(But keeping the input power above +10 dBm shouldn't be an issue. After all, +10 dBm represents 10 milliwatts.)
(Note, as power decreases, even if VR weren't clamped to 0V by U1, the same effect would occur at some lower power level because the Reflected path's AD8307 transfer-characteristic limits-out at at the lower limit of its input-power specification.)
We can use this behavior to mimic a step-change in the impedance seen by the Directional Coupler's output.
Here's an oscilloscope capture of VRL step-response to a step-change in the signal level applied to it (via my Fluke 6060B). Although I'm stepping the level from -20 to -10 dBm, which, per the previous table, should give a VRL transient from 1.5 to 3 volts (a Return Loss step from 10 dB to 20 dB), the Fluke's attenuator relays, as they change, briefly create an attenuation larger than -20 dBm before they step to +10 dBm. The result is that VF goes to 0 volts (rather than starting at 0.5V) before stepping to 1.0 volt. VR is 0 volts in both cases, and thus VRL (being equal to VF-VR) steps from 0V to 3V.
In other words, this test mimics a step-change in Return Loss from 0 dB to 20 dB.

VRL settles down within about 7-8 msec of the initiation of the step transient.
4. Impact of Directional Coupler circuitry and the Additional Grounded Shields on Tuner Match Performance:
This test checks if the addition of the Directional Coupler assembly (and its shields) has any effect on the Tuner's "match-space." This test is performed at 30 MHz (the highest frequency I'm specifying for this tuner) to accentuate the negative effects of any stray parasitic components.
The test is identical to the one described in this post: http://k6jca.blogspot.com/2015/09/antenna-auto-tuner-design-part-7-build.html
And here are the results:

Below are the results from my prior testing (from Part 7 of this series of posts):

These two plots appear identical to my eyes. Therefore, the incorporation of the Directional Coupler assembly into the tuner has little, if any, effect on the tuner's match-space.
Other Notes:
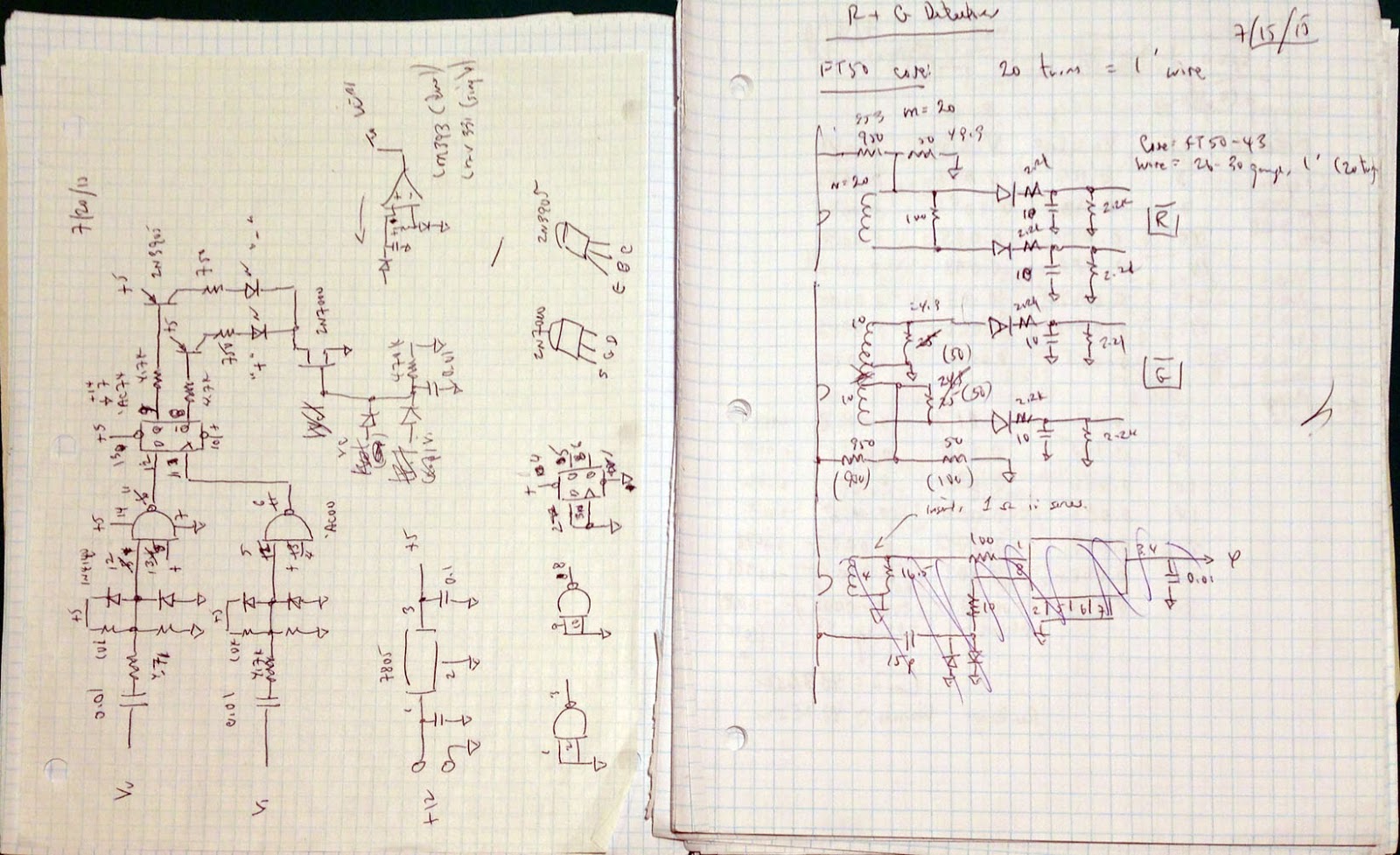
I actually breadboarded the R, G, and Phase Detectors just to make sure that, conceptually, they worked. And they did, but I only did a minimal amount of testing.
Here is an image of the schematics:

Note that the schematics are not entirely representative of the final breadboard circuit (they are included here only for sake of completeness).
For example, after I smoked one of the resistors in my first voltage sampler, I changed the two resistive transmission-line voltage samplers to instead be capacitive voltage dividers (each divider became a 1.7-11 pF variable cap (to the transmission line) in series with 120 pF fixed cap (to ground)).
I also needed to add a DC path to ground (yet high impedance at RF) at each capacitive dividers' voltage-divider node. I did this with a 2.5 mH inductor connected in parallel across each 120 pF cap.
Also, I deleted the 2N7000 in the phase detector -- the goal was to have the LEDs turn ON only when RF was present. But, given the 2N7000 turn-on voltage, this wasn't working as planned for the RF power levels I was testing at. No problem, as I didn't really need to do this to verify detector functionality, so I simply grounded the 2N7000's Drain to ground.
And the Vv and Vi signals are defined per the definitions shown in my post (post 6 in this series) on Match Detection.
OK, that ends this post!
Part Nine of this blog series is posted here: http://k6jca.blogspot.com/2016/01/antenna-auto-tuner-design-part-9-build.html
And please note: The "final" schematics could have changed from the versions included above, in this post. The final "release" schematics can be found in Part 10 of this series: http://k6jca.blogspot.com/2016/01/antenna-auto-tuner-design-part-10-final.html
Links to my blog posts in this Auto-tuner series:
Part 1: Preliminary Specification
Part 2: Network Capacitor Selection
Part 3: Network Inductor Selection
Part 4: Relays and L-Network Schematic (Preliminary)
Part 5: Directional Coupler Design
Part 6: Notes on Match Detection
Part 7: The Build, Phase 1
Part 8: The Build, Phase 2 (Integration of Match Detection)
Part 9: The Build, Phase 3 (Incorporating a Microcontroller)
Part 10: The Final Schematics
Links to my Directional Coupler blog posts:
Notes on the Bruene Coupler, Part 2
Notes on the Bruene Coupler, Part 1
Notes on HF Directional Couplers (Tandem Match)
Note: Many designs using the Tandem Match Directional Coupler topology use identical cores for both Voltage and Current sensing transformers. They needn't (as I've demonstrated above), and if a design is space-constrained (or cost constrained), a smaller core can be used for the current-sense transformer.
2. Turns-ratio:
My original plan was to use 25 turns on each coil, but when I wound my first transformer I discovered that I had cut the wire slightly too short and I only had enough wire to wind 24 turns around the core. Rather than rewind the core, I decided that 24 turns was good enough -- its Coupling Factor is 27.6, which is only 0.4 dB less than 28 dB (the Coupling Factor if the turns-ratio were 25, not 24).
3. AD8307, Return Loss, and non-Simultaneity:
Why use AD8307 Log-amp detectors rather than just rectify the Directional Coupler's Forward and Reflected port voltages and amplify/buffer them with op-amps?
Two reasons. The first is convenience.
I wanted to have some way to measure and display load-mismatch before I incorporated a microprocessor into the design. I had used the AD8307 IC previously (here), and I knew that two AD8307 ICs would make this mismatch-measurement task easy -- they would convert the Directional Coupler's voltages into decibel form, from which Return Loss (which is related to SWR) could be calculated by simply subtracting the Reflected-path's AD8307 output from the output of the Forward-path's AD8307 output.
This Return Loss measurement would be accurate over a wide range of power (sub-watt to a kilowatt, in my design) without any need for additional pot tweaking if the input power changed.
And the second reason for this choice is my concern over A/D sampling methodology...
Over the years I've collected a number of commercial ham radio auto-tuners utilizing relay-switch components and controlled by microprocessors. Most of them are gathering dust on a closet shelf because, when I used them, I noticed at times an inability to achieve a good match, even though one was available.
I've assumed this problem was due to microprocessor sampling, specifically that the micro was sampling and converting the Forward and Reverse voltages sequentially, rather than simultaneously.
Why might sequential sampling be a problem?
Suppose that the power level into the Tuner was fluctuating during these measurements (perhaps due to PA ALC action caused by load impedance variation (as the tuner tunes), or perhaps due to voice transients, or perhaps due to some other reason), then, if the power level changed between the measurement of the Forward voltage and the measurement of the Reflected voltage, the microprocessor's SWR calculation could be incorrect.
And if the SWR calculation was incorrect, it was possible, too, that the tuned-to setting was incorrect and perhaps sub-optimal.
Of course, the severity of this potential error is a function the time delay between sequential samples as well as the input-power's rate-of-change.
Could either of these be large enough to be an issue? I didn't, and don't, know. But just in case they were, by calculating Return Loss (or SWR) externally and then feeding that result into a single A/D, rather than calculating Return Loss or SWR from two sequentially-sampled A/D values, the possibility of there being a problem (be that problem real or imaginary) was eliminated.
OK, let's continue...
4.AD8307 input range and PI attenuator:
From the its datasheet, here is a graph of the AD8307's output voltage versus input power:
(Click on image to enlarge)

As you can see, the transfer characteristic becomes noticeably non-linear above +15 dBm and below about -68 dBm. So (in my opinion), a reasonable range of operation (with a bit of headroom) would be between -60 and +10 dBm.
I've specified the maximum power that this tuner should see as being 800 watts, but for the purposes of determining the input-range of the AD8307 ICs let's assume that it's 60 dBm (1 KW).
Therefore I will need 50 dB of attenuation to bring a 60 dBm signal down to my desired AD8307 maximum input level of +10 dBm.
Given that the 24-turn transformers have a Coupling Factor of 27.6 dB, I will need an additional 22.4 dB of attenuation (it doesn't need to be exactly 22.4 dB -- somewhere in the ballpark of that value will be fine -- I've designed in plenty of headroom).
So I've terminated each output of the Directional Coupler with a 50-ohm 22 dB PI-network attenuator. Implemented with standard 1% resistor values (59 and 316 ohms) and taking into account the AD8307's input resistance of 1.5K ohms, the actual attenuation is 22.2 dB, and its input Return Loss is 50 dB. (PI Network calculator here: http://chemandy.com/calculators/matching-pi-attenuator-calculator.htm).
For power-dissipation calculations the maximum average power applied to the tuner is assumed to be 200 watts. This power level is attenuated by the Directional Coupler's Coupling Factor (27.6dB) prior to being applied to the PI attenuators, which means that the maximum average power applied to a PI attenuator would be 0.35 watts.
Most of this 0.35 watts would be dissipated by the PI attenuator's first shunt resistor, so I've implemented this resistor with two 118 ohm 1/4-watt resistors connected in parallel.
5. AD8307 Circuit:
The AD8307 circuitry is essentially the same circuit shown in the datasheet. I have not incorporated the Intercept and Gain pots, preferring to do these functions in the Return Loss Calculator circuitry (described later in this post).
One AD8307 converts the Forward Power from the Directional Coupler to a decibel-related voltage. The second AD8307 does the same for the Reflected Power.
The two AD8307 ICs are in their own shielded compartment with 0.1uF caps (and feed-thru caps) at the output and power pins of these two ICs to reduce the chances of external RF fields affecting performance in unwanted ways.
Note that the second shunt resistor of each PI attenuator is also installed in this compartment.
The AD8307 outputs have a transfer characteristic of about 25mV per dB of applied power, with a DC offset (when no RF is applied) of (very) roughly 0.28 VDC.
Schematic, Return Loss Calculator:
(Click on image to enlarge)

Notes on the Return Loss Calculator Schematic:
(Important note: there was a design error in the original schematic that I posted here (Rev. X). The schematic above is the corrected schematic, and its revision-level is now Rev. A1. Please see Post 9 in this series for a description of the error and an explanation of the fix).1. Return Loss relation to SWR
The AD8307 output voltages represent, in dB form, the power applied to their inputs. And thus Return Loss can be calculated via a simple subtraction, implemented with a single op-amp:
where Pi(dBm) is the output of the Forward path AD8307 and Pr(dBm) is the output of the Reflected path AD8307 (equation copied from Wikipedia).
SWR is related to Return Loss by this equation:
Not a simple relationship, but knowing this equation, if I'm using an analog panel meter to aid me in tuning, and if this meter's full-scale represents 30dB return loss (i.e. only 0.1% of the applied power is reflected back -- a very good match!), then I can easily mark the meter's scale per the following table:
(Click on image to enlarge)

A note on Return Loss meter orientation: when tuning an antenna tuner using a Return Loss meter, the goal is to peak the Return Loss reading, which will then correspond to minimum SWR. But I've been adjusting tuners for decades by dipping SWR meters for minimum SWR, so the Return Loss adjustment method of peaking the reading seems awkward to me.
A simple solution (it seems to me) is to install the Return Loss meter upside-down. So, in my tuner, a Return Loss of 0 (infinite SWR) corresponds to the meter's needle at the top of the meter (undeflected). And when the tuner has been tuned for a 1:1 match, the needle will deflect to its full-scale reading at the bottom of the meter's scale -- thus one dips the meter for best SWR!
(Click on image to enlarge)

2. VF and VR circuits:
One of my goals is to incorporate a processor with A/D inputs (PIC or Arduino) to perform the automatic tuning, and I thought it would be nice to use the processor to calculate and display Forward Power using the AD8307 VF signal (and perhaps calculate and display Reflected Power using VR).
Assuming the processor A/D is referenced to its VDD pin (+5VDC), I'd like to have 4.5VDC represent the maximum applied power of +60 dBm (to give me a bit of headroom).
Also, I would like the range of Forward Power represented by VF to be, at a minimum, from 1 watt (30 dBm) to 1 KW (60 dBm). Plus, if I'm measuring a 30 dB Return Loss when Forward Power is 1 watt, then the Reflected Power will be 1 milliwatt (0 dBm). And so VR must be just at least 0V when the Reflected Power is 0 dBm.
So, VF and VR, in spanning the range from 0 to 4.5 volts, must represent, at a minimum, a power range of 0 to 60 dBm.
If the AD8307's transfer function is 25 mV per dB, then multiplying this value by 3 would result in a transfer function of 75 mV per dB, which would give us a 60 dB span over the voltage range from 0 to 4.5 volts.
But why not have a bit more range? If I multiply the AD8307's transfer function by 2 instead of 3, I will change the transfer function to 50 mV per dB (500 mV per 10 dB). Assuming a 10-bit ADC referenced to 5 VDC, measurement resolution would be about 0.1 dB, which would be perfectly fine in this application.
And note that at 50 mV per dB, 0 to 4.5V will represent a 90 dB span, so I could accurately measure power and Return Loss at powers well below 1 watt. (Theoretically, this would put the lower Forward Power limit for accurate Return Loss measurements at 0 dBm (1 milliwatt), but as I'll discuss below, the AD8307's specifications result, in this application, in a practical lower limit of +10 dBm Forward Power for accurate measurements).
Op-amps U1A and U1B, configured as non-inverting amplifiers with gains of 2, perform this amplification. And by connecting the AD8307 outputs directly to their non-inverting inputs, I avoid any unnecessary loading of the AD8307 outputs that might affect their gain.
Potentiometers R11 and R12 create a DC shift so that, when calibrated, +4.5V represents +60dBm. U11B and U11C isolate these two pots from being included in the gain-equations of the U1A and U1D feedback networks, so that adjusting R11 and R12 won't also change the path gain.
The voltages at U1.7 and U1.8 should be about 0.75 VDC when R11 and R12 are centered. I then adjust R11 and R12 so that, for a +10 dBm signal applied to the Directional Coupler, VF (or VR) measures 2.00 VDC.
3. Return Loss Circuit:
U2 performs two functions. It subtracts VR from VF to create the Return Loss measurement, and it also multiplies this result by 3.
The scaling factor of 3 was chosen so that a measurement of 30 dB of Return Loss would be equal to 4.5V at VRL (VRL is the Return Loss signal that would drive a processor A/D input). In other words, given the transfer characteristic of VF and VR of 50 mV per dB, I'd like the Return Loss transfer characteristic to be 150 mV per dB.
U2 also drives an analog panel meter so that I can use the tuner without having a processor installed. The meter is 1 mA full-scale, and R19 adjusts the current through the meter so that 4.5V at VRL results in 1mA through the meter. Thus, the meter would read 30 dB of Return Loss when deflected to its full scale.
R24 compensates for differences in path-gain between the Forward and Reflected paths. Because it is in the attenuator network attached to U2's non-inverting input, it adjusts the gain of the Forward path (the gain of the Reflected path being fixed).
But there's a potential problem -- changing the gain at this point also changes, in effect, VF's DC offset as seen at U2's non-inverting input. And because this change in DC offset at U2 is occurring simultaneously with a change in the Forward path gain at U2, these two changes become inextricably intertwined, and I don't know by how much I should adjust R11 to compensate for this change in offset.
The net effect is that VRL could be shifted slightly either higher or lower by a constant amount. And thus Return Loss could be shifted, too, to be either higher or lower than it should be.
If the shift is small, this shouldn't be a big deal. But it could become a problem for larger shifts, depending upon how accurate one wants the Return Loss measurement to be.
Fortunately, in my "one-off" build, the transfer characteristics of the two AD8307 ICs are essentially identical at 25 mV per dB and so adjusting U2's gain via R24 should be fine in this application -- I'm essentially just setting the gains of each of U2's "legs" to be equal. But in hindsight I would have approached path-gain compensation differently.
For example, I probably would have made U2's gain fixed, without any pots (and using 1% resistors) and instead had separate gain adjustments earlier in the Forward path and the Reflected path. Pots could have been placed at the outputs of the AD8307 ICs (per the datasheet), for example, or in the feedback networks of U1A and U1D.
But that's hindsight.
4. Other notes:
0.1 uF caps are sprinkled liberally throughout the circuit and especially at any connector to which a cable might attach, thus bypassing these connectors to ground to (hopefully) prevent external RF fields that might couple into the wiring from affecting circuit operation.
I've inserted 100 ohm resistors between op-amp outputs and 0.1uF bypass caps (where these are used) to "isolate" the op-amp's output (and feedback network) from the capacitive load and thus isolate this load's effect on the overall amplifier phase-response and stability. (More info on this here (Analog Devices), here (TI), and here (Microchip)). (Unfortunately, TI doesn't spec the output impedance of the LMC660 series, so it's difficult to judge what the effect actually is. However, per my bench measurements, stability seems fine).
I also roll-off the U2's response with C9 and C10, placing a pole at about 5 KHz -- there's no reason why this op amp needs a wide bandwidth.
OK, I believe I've covered the schematics. On to the build...
Build, Directional Coupler:
The Directional Coupler started out as a prototype on a piece of PCB stock that would fit within the Tuner on the existing Capacitor-select board. I tried some different orientations for the two transformers, such as orthogonal to each-other, but Directivity was only about 20 dB, so I went back to the implementation I'd used in this post: http://k6jca.blogspot.com/2015/01/building-hf-directional-coupler.html, which was:

I changed the current-sense transformer's core size (see discussion above) and bread-boarded the circuit:

Measuring Directivity:
With the implementation shown above Directivity measure 45 dB or better from 1 to 30 MHz. But when I added additional compartment shielding and the 22 dB PI attenuators, worst-case Directivity dropped from 45 dB to 35 dB:

Note that the 30 MHz marker in the image above shows 85 dB of attenuation. But we need to factor out 50 dB of attenuation (27.6 dB coupling factor plus the PI Attenuator's 22.2 dB of attenuation). The result is 35 dB of attenuation, which represents the Directional Coupler's Directivity.
Here's that implementation:

(Note that you can just see the AD8307 circuitry at the far-left of the image above. Although present in the photo above, this circuitry had not yet been installed when I made my Directivity measurements.)
Also, if you look closely, you can see some yellow Teflon insulation on the end of one of the voltage-sense transformer's secondary winding. There is actually Teflon insulation on both ends of this winding. Both ends are side-by side on the transformer and there is a high voltage potential between them (one end being grounded and the other end connected to the transmission line).
There is also a little rectangle of Kapton tape mounted under voltage-sense transformer on the bottom of the compartment. It provides a bit more voltage isolation between the transformer windings and chassis ground.
(I also tested an implementation using a 2643625002 core for the current-sense transformer. I saw no difference in performance between it and the FT50-43 I am currently using.)
Return-Loss Uncertainty due to Directivity:
Now that I knew the Directional Coupler's Directivity, I could determine Return-Loss Uncertainty.
Note that with a worst-case Directivity of 35 dB, there will be an increasing uncertainty in Return Loss readings as the Return Loss approaches its theoretical maximum of 35 dB (Return Loss cannot be larger than the Directivity). This uncertainty is shown in the table below, per the calculator found here bytecollector.com/library/DirectivityErrorCalc-w-SWR.xls:
(Click on image to enlarge)

So, given my planned-for maximum Return Loss reading of 30 dB and a worst-case Directivity of 35 dB, the actual Return Loss for this reading (and excluding path errors such as AD8307 accuracy) would lie somewhere in the range between 26 and 37 dB, which represents an actual SWR that would be between 1.03 and 1.1 -- still quite acceptable.
AD8307 circuit implementation:
The AD8307 ICs are SOIC-8 packages. I find that such a small size can be a headache to prototype with (unless, of course, one has a PCB with appropriate component footprints), so I purchased some small SOIC prototyping boards from eBay. These greatly facilitate wiring to the IC pins. (Alternatively, I could have purchased these ICs in DIP packages).

(I later added copper tape to shield the sides of the AD8307 chamber, and a copper top will be added over the entire assembly after I finished mounting it in the tuner chassis).
Build, Return Loss Calculator:
When I finished my Directional Coupler build I discovered, if I placed it in the Tuner chassis, there wasn't much additional room available on the Capacitor-selection board for me to add the Return Loss Calculator Circuitry.
And given the fact that my junk-box potentiometers were all designed to mount end-on, I decided instead to build the circuit on a small piece of plated-through perf board that I would mount vertically on the bulkhead shield that separates the Tuner's RF compartment from the Control compartment.
Although the two ICs are DIP ICs, the passive resistors and capacitors are all surface mount (0805 packages).
Here's the build, shown un-annotated and also annotated with I/O names and potentiometer reference designators added:


The board was notched in two places due to mechanical interference issues with two pre-existing mounting screws, given the tight space that I was trying to mount it into.
Incorporating the Directional Coupler and the Return Loss Assemblies into the Tuner Chassis:
Here's a picture showing the installed Directional Coupler Assembly and Return Loss Calculator Assembly. (You can see the latter's pots next to the bulkhead divider).

(Note that I did not remove the SMA connectors on the Directional Coupler assembly. They are left there in case I need them for future testing.)
Below I've installed a copper plate (cut from a sheet of 26 gauge copper) over the top of the RF compartments, with bent-down tabs tacked to the side walls in 5 places.

Calibration Procedure:
1. With the Directional Coupler's output unloaded (open load) and disconnected from the Tuner's L-Network circuitry, and with a +10 dBm 3.5 MHz signal applied to the Directional Coupler's input, make the following adjustments:
- Adjust R11 so that VF is 2.00 VDC
- Adjust R12 so that VR is 2.00 VDC
- Adjust R24 so that VRL measures 2.10 VDC (equals 14 dB Return Loss times 0.15V/dB)
- Adjust R23 so that the Panel Meter deflects to 47% of Full Scale.
Design Verification Measurements:
1. VF and VR versus Input Power.
This test is performed with the Directional Coupler's output unloaded (i.e. open, so that Forward and Reflected powers are identical) and after R11 and R12 have been calibrated to give equal readings of 2.00 volts at VF and VR for a +10 dBm input signal. It measures the response, versus signal level, of VF and VR.
(Click on image to enlarge)

Note that the gain of VF and and the gain of VR are essentially identical. (There's no guarantee that this will be true for all AD8307's, though).
2. VRL versus Zload:
This test measures the Return Loss voltage versus different loads connected to the Directional Coupler's output. Note that the Zload is resistive rather than a complex impedance.
(Click on image to enlarge)

For the three loads I used, the measured Return Loss is close (error under a dB) to the loads' actual Return Loss (per my HP 8753A). This error is quite adequate for my tuner application, which is not meant to be a lab-grade measurement device.
3. Step Response, VRL
This test checks VRL's step-response to a change in Return Loss, measuring the amount of time it would take the VRL reading to settle down after, for example, a change to the tuner's L-Network settings.
But rather than performing the test by changing the Directional Coupler's load in a "step" fashion (for which I'd have to design some sort of fast-switching circuit), I instead "mimic" a change in load impedance by taking advantage of the VF and VR circuits' characteristics at low signal levels.
This is an important point: specifically, if the drive to the Directional Coupler is less than +10 dBm, and if the load itself is an accurate 50 ohm load (Return Loss > 30 dB), the measured Return Loss will be a function of the input power level, rather than a function of the load attached.
This effect is mainly due to the fact that, at low power levels, the VF and VR op-amp outputs will clamp to their negative rail -- they cannot go below 0 volts.
Thus, even with a 50 ohms load is connected to the Directional Coupler's output, Return Loss will appear to be very poor if the applied power level is very low, as I demonstrate in this table:

As one can see, because VR cannot go below U1's lower power rail of 0V, the delta between VF and VR is artificially reduced at low power levels. And so Return Loss erroneously appears to worsen.
One important conclusion from this data: If the input power applied to the Directional Coupler is less than +10 dBm, the Return Loss measurement could be wrong. So tuning should only be done when VF measures at least 2.0 VDC (i.e. input power at least +10 dBm).
(But keeping the input power above +10 dBm shouldn't be an issue. After all, +10 dBm represents 10 milliwatts.)
(Note, as power decreases, even if VR weren't clamped to 0V by U1, the same effect would occur at some lower power level because the Reflected path's AD8307 transfer-characteristic limits-out at at the lower limit of its input-power specification.)
We can use this behavior to mimic a step-change in the impedance seen by the Directional Coupler's output.
Here's an oscilloscope capture of VRL step-response to a step-change in the signal level applied to it (via my Fluke 6060B). Although I'm stepping the level from -20 to -10 dBm, which, per the previous table, should give a VRL transient from 1.5 to 3 volts (a Return Loss step from 10 dB to 20 dB), the Fluke's attenuator relays, as they change, briefly create an attenuation larger than -20 dBm before they step to +10 dBm. The result is that VF goes to 0 volts (rather than starting at 0.5V) before stepping to 1.0 volt. VR is 0 volts in both cases, and thus VRL (being equal to VF-VR) steps from 0V to 3V.
In other words, this test mimics a step-change in Return Loss from 0 dB to 20 dB.
(Click on image to enlarge)

VRL settles down within about 7-8 msec of the initiation of the step transient.
4. Impact of Directional Coupler circuitry and the Additional Grounded Shields on Tuner Match Performance:
This test checks if the addition of the Directional Coupler assembly (and its shields) has any effect on the Tuner's "match-space." This test is performed at 30 MHz (the highest frequency I'm specifying for this tuner) to accentuate the negative effects of any stray parasitic components.
The test is identical to the one described in this post: http://k6jca.blogspot.com/2015/09/antenna-auto-tuner-design-part-7-build.html
And here are the results:
(Click on image to enlarge)

Below are the results from my prior testing (from Part 7 of this series of posts):
(Click on image to enlarge)

These two plots appear identical to my eyes. Therefore, the incorporation of the Directional Coupler assembly into the tuner has little, if any, effect on the tuner's match-space.
Other Notes:
I actually breadboarded the R, G, and Phase Detectors just to make sure that, conceptually, they worked. And they did, but I only did a minimal amount of testing.
Here is an image of the schematics:
(Click on image to enlarge)
Note that the schematics are not entirely representative of the final breadboard circuit (they are included here only for sake of completeness).
For example, after I smoked one of the resistors in my first voltage sampler, I changed the two resistive transmission-line voltage samplers to instead be capacitive voltage dividers (each divider became a 1.7-11 pF variable cap (to the transmission line) in series with 120 pF fixed cap (to ground)).
I also needed to add a DC path to ground (yet high impedance at RF) at each capacitive dividers' voltage-divider node. I did this with a 2.5 mH inductor connected in parallel across each 120 pF cap.
Also, I deleted the 2N7000 in the phase detector -- the goal was to have the LEDs turn ON only when RF was present. But, given the 2N7000 turn-on voltage, this wasn't working as planned for the RF power levels I was testing at. No problem, as I didn't really need to do this to verify detector functionality, so I simply grounded the 2N7000's Drain to ground.
And the Vv and Vi signals are defined per the definitions shown in my post (post 6 in this series) on Match Detection.
OK, that ends this post!
Part Nine of this blog series is posted here: http://k6jca.blogspot.com/2016/01/antenna-auto-tuner-design-part-9-build.html
And please note: The "final" schematics could have changed from the versions included above, in this post. The final "release" schematics can be found in Part 10 of this series: http://k6jca.blogspot.com/2016/01/antenna-auto-tuner-design-part-10-final.html
Links to my blog posts in this Auto-tuner series:
Part 1: Preliminary Specification
Part 2: Network Capacitor Selection
Part 3: Network Inductor Selection
Part 4: Relays and L-Network Schematic (Preliminary)
Part 5: Directional Coupler Design
Part 6: Notes on Match Detection
Part 7: The Build, Phase 1
Part 8: The Build, Phase 2 (Integration of Match Detection)
Part 9: The Build, Phase 3 (Incorporating a Microcontroller)
Part 10: The Final Schematics
Links to my Directional Coupler blog posts:
Notes on the Bruene Coupler, Part 2
Notes on the Bruene Coupler, Part 1
Notes on HF Directional Couplers (Tandem Match)
Building an HF Directional Coupler
Notes on the Bird Wattmeter
Notes on the Monimatch
Notes on the Twin-lead "Twin-Lamp" SWR Indicator
Calculating Flux Density in Tandem-Match Transformers
Standard Caveat:
As always, I might have made a mistake in my equations, assumptions, drawings, or interpretations. If you see anything you believe to be in error or if anything is confusing, please feel free to contact me or comment below.
And so I should add -- this design and any associated information is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
Notes on the Bird Wattmeter
Notes on the Monimatch
Notes on the Twin-lead "Twin-Lamp" SWR Indicator
Calculating Flux Density in Tandem-Match Transformers
Standard Caveat:
As always, I might have made a mistake in my equations, assumptions, drawings, or interpretations. If you see anything you believe to be in error or if anything is confusing, please feel free to contact me or comment below.
And so I should add -- this design and any associated information is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.














